인용이 필요하신 분은 학술연구정보서비스 riss.kr에서 namkyuchul로 검색해주세요.

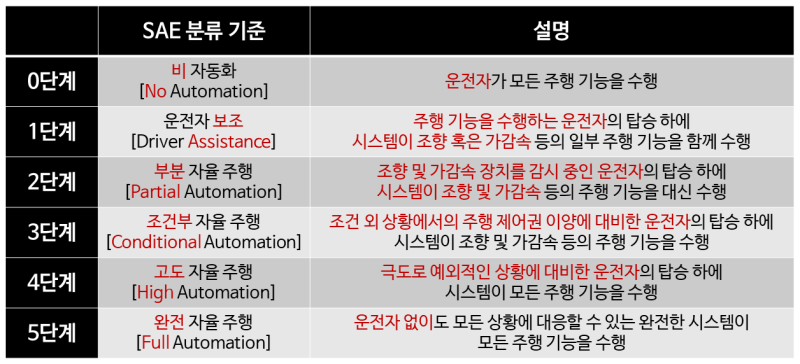
차량용 자율주행기술 수준분류(SAEJ3016)
차량용 자율주행기술 수준분류(SAEJ3016)
인기글




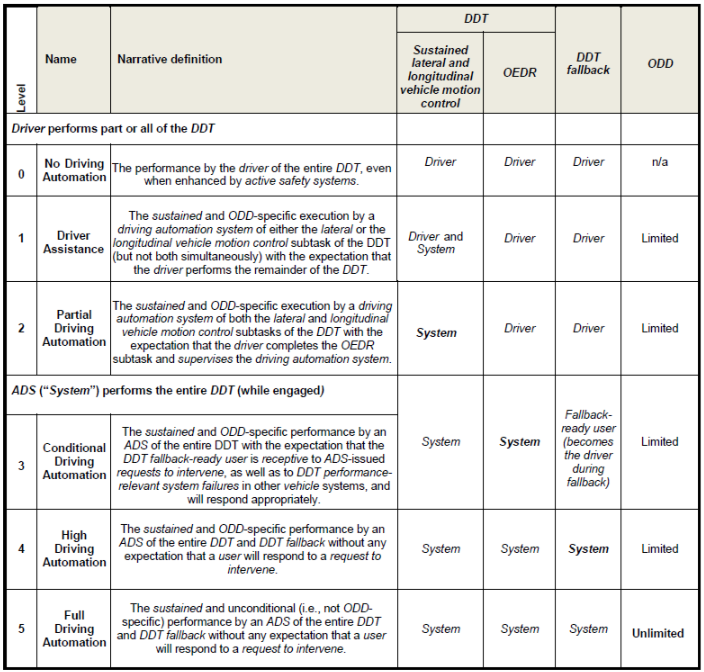
레벨 BAST (독일) NHTSA (USA) SAE J3016 (International) 0 드라이버만 자동화 없음 자동화 없음 1 Assisted Function† 고유의 자동화 Assisted 2 부분 자동화 복합 기능 자동화 Partial Automous 3 고자동화 제한 자동화 조건부 자동화 4 풀 오토메이션 완전 자율주행 하이 오토메이션 5–풀 오토메이션
표 2. 노상차량 자율시스템 수준분류에 따른 특성(Wevolver, 2020).
레벨 분류 012345 TermNo 자동화 드라이버 어시스턴스 부분 자동화 조건부 자동화 고도의 자동화 풀 오토메이션 컨트롤 오퍼레이터 휴먼 시스템 시스템 시스템 책임 휴먼 휴먼/시스템 시스템 운영상황 올온풋 핸드오프 아이즈오프 마인드오프 올오프
표3. 자율농기계 수준별로 정보를 입력합니다.
수준 파라미터 내용 1운영자 정보 농가 정보 농가 정보 농작물의 종류 농가 필드 정보(위치, 토양 등)2기기 정보 기계 정보(기종 이름, 규격, 사양)회전 반경 회전 감도 GPS보정(GPS수신기의 위치)3정보의 구현 정보의 구현(모델명, 표준, 사양)설치 방법(타우닝그, 마운트 세미 마운트)GPS보정(GPS수신기에서 엔드 포인트의 실장까지 거리)4경로 계획과 추적 방법 경로 설정(직선, 곡선)패스 변경 기능(스티어링 방식 등)다섯 헷도란도 정보 헷도란도 경계 설정
레벨 파라미터 내용 1 오퍼레이터 정보 농가 정보 농작물의 종류 농가 필드 정보(위치, 토양 등) 2 기기 정보 기계 정보(기종명, 규격, 사양) 회전 반경 회전 감도 GPS 캘리브레이션(GPS 수신기의 위치) 3 정보의 실장 정보의 실장(모델명, 표준, 사양) 설치 방법(타우닝, 마운트, 세미 마운트) GPS 캘리브레이션(GPS 수신기에서 엔드포인트의 실장까지의 거리) 4 경로 계획과 추적 방법 경로 설정(직선, 곡선) 경로 변경 기능(스티어링 방식 등) 5 헤드랜드 정보 헤드랜드의 경계 설정
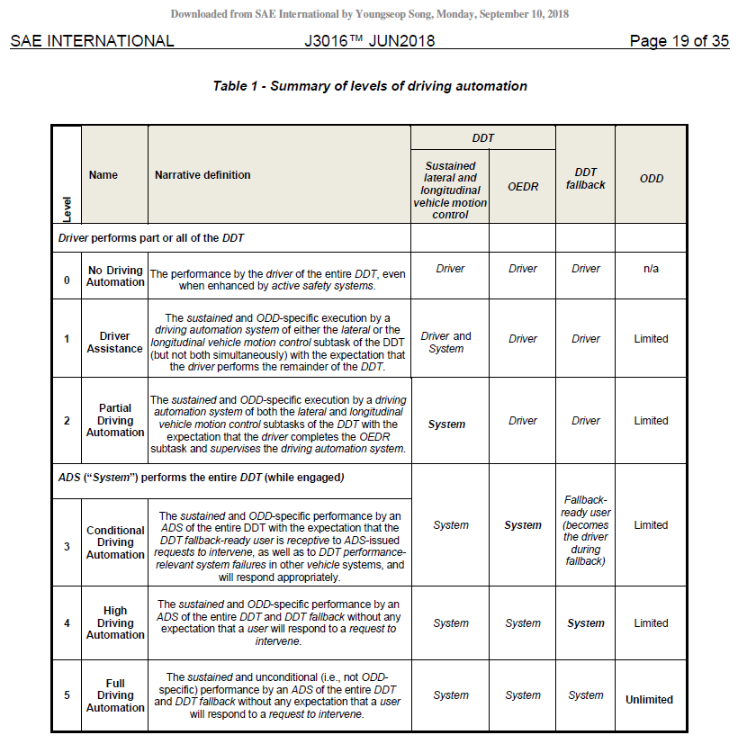
그림 1. 노상차량의 동적 운전업무를 나타내는 운전업무의 개략도(SAE International, 2016).
그림2. 농기계 자율시스템의 개략도
그림3. 자율형 농기계의 수준분류
인용이 필요하신 분은 학술연구정보서비스 riss.kr에서 namkyuchul로 검색해주세요.